Текст всей главы с подробным описанием метода характеристической полосы Хорна находится по ссылке http://uic.nnov.ru/~egyb/doc/horn11_4.zip
Здесь представлена середина 11 главы из книги Хорн Б. К. П. "Зрение роботов" Пер. с англ. — М, Мир, — 1989.
(скачать текст книги можно в формате MS Word .doc на uic.unn.ru/~egyb/lit.html или в формате
.djvu на padabum.com/d.php?id=4144)
Коротко о Методе характеристической полосы (методе Хорна по распознаванию формы на изображении):
11.1.4. Общий случай
Предположим, что мы имеем координаты некоторой точки поверхности и хотим продолжить решение из этой точки. Используя малое
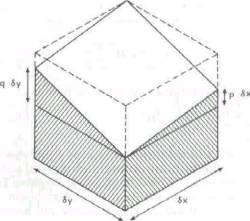
Рис. 11.4. Изменение высоты δz как сумма изменений высот рδх и qδy, обусловленных малым шагом по x и y соответственно.
приращение (δx,δу), мы ещё раз заметим, что изменение дальности (или глубины) задается выражением δz = р δх + q δу, где р и q — первые частные производные z по x и у (рис. 11.4). Больше ничего нельзя сказать, пока не станут известны р и q. К сожалению, уравнение освещённости изображения даёт только одно условие; этой информации недостаточно, чтобы получить решение как для р, так и для q.
Предположим временно, что мы узнали р и q в данной точке. Тогда мы можем продолжить решение из точки (x, у) в точку (x + δx, y + δy). Однако для этого необходимы новые значения р и q в этой точке (рис. 11.5). Теперь изменения p и q можно вычислить по формулам δp = r δx + sδy и δq = sδx + tδy, где r, s и t — вторые частные производные по z, х и у. Их можно переписать в компактной форме

где Н — матрица Гессе вторых частных производных (гессиан)
H = 
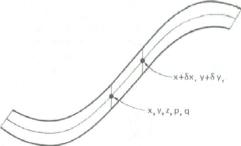
Рис. 11.5. Решение задачи восстановления формы по распределению полутонов, определяемое решением пяти дифференциальных уравнений относительно х, у, z, р и q.
Результатом является характеристическая полоса, т. е. кривая в пространстве, вдоль которой известна ориентация поверхности
Матрица Гессе дает информацию о кривизне поверхности. Для малых наклонов поверхности её детерминант является гауссовой кривизной, которую мы введём ниже. Кроме того, след матрицы Гессе (сумма её диагональных элементов) — это лапласиан дальности, который для малых наклонов поверхности равен удвоенной так называемой средней кривизне. Мы будем изучать кривизну поверхности в гл. 16 при рассмотрении расширенных гауссовых образов.
При использовании матрицы Гессе для вычисления изменений р и q необходимо знать её компоненты (вторые частные производные z). Чтобы следить и за ними, нужно знать производные более высоких порядков. Так можно было бы продолжать дифференцирование до бесконечности. Однако заметим, что мы ещё не использовали уравнение освещённости изображения. Дифференцируя его по х и у и используя правило дифференцирования сложной функции, получим Ex= r·Rp + s·Rq и Ey = s·Rp + t·Rq или
 ,
,
 или
или
Таким образом,
если направление смещения на плоскости изображения параллельно градиенту на карте
отражательной способности, то можно вычислить изменения (р, q). В свою очередь направление смещения в градиентном
пространстве параллельно градиенту на изображении (рис. 11.6). Мы можем подытожить
всё это в виде пяти обыкновенных дифференциальных уравнений
x′ξ = Rp,
y′ξ = Rq,
z′ξ = p Rp + q Rq,
p′ξ = Ex,
q′ξ = Ey,
где штрихи означают дифференцирование по ξ.
Решение системы этих уравнений является кривой на поверхности.
Вдоль неё будет изменяться параметр x. Масштабированием этих уравнений мы можем сделать
параметр x
любой функцией длины кривой.
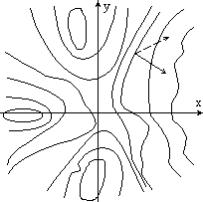
Рис. 11.6. Шаги, взятые в пространстве градиентов рq и пространстве изображения xy, параллельны градиентам Е(х, у) и R(p,q) соответственно.
11.2. Характеристические и начальные линии
Кривые, являющиеся решениями пяти обыкновенных дифференциальных уравнений называются характеристическими линиями, а их проекции на изображение — базовыми характеристиками. В действительности решения для x, y, z, р и q образуют характеристическую полосу, так как они определяют не только кривую в пространстве, но и ориентацию поверхности вдоль этой кривой (рис. 11.5).
Для получения полной поверхности мы должны «сшить» характеристические полюсы. Каждая из них должна иметь точку, в которой заданы начальные значения; из нее начинается решение. Если нам задана начальная линия на поверхности, то решение для поверхности можно

Рис. 11.7. Метод восстановления формы по распределению полутонов используемый для восстановления формы носа.
а — грубо дискретизированное полутоновое изображение, готовое к вводу в компьютер; б — базовые характеристики, наложенные на первое изображение; в — линии уровня, вычисленные по оценкам, найденным вдоль характеристических кривых.
получить, если эта линия нигде не касается ни одной из характеристик. На этой линии начальные величины р и q можно получить с помощью уравнения освещённости изображения Е(х, у) = R(р, q) и известных производных z вдоль кривой, Предположим, например, что начальная линия задана через параметр h в виде x(h), у(h) и z(h). Тогда вдоль этой кривой ∂z/∂η = p (∂z/∂η) + q (∂y/∂η).
Мы сейчас ввели метод распространения характеристической полосы при решении дифференциальных уравнений в частных производных первого порядка. В нашем случае релевантным уравнением является уравнение освещённости изображения, т. е. (возможно, нелинейное) уравнение в частных производных первого порядка. На рис. 11.7 представлены изображение лица, преобразованное в цифровую форму, то же лицо с наложенными на него базовыми характеристиками и то же лицо с линиями уровня восстановленной поверхности.